| 研究開発 テーマ |
⑦安全・安心・賑わいのあるみち空間と交通システム構築 | ||
|---|---|---|---|
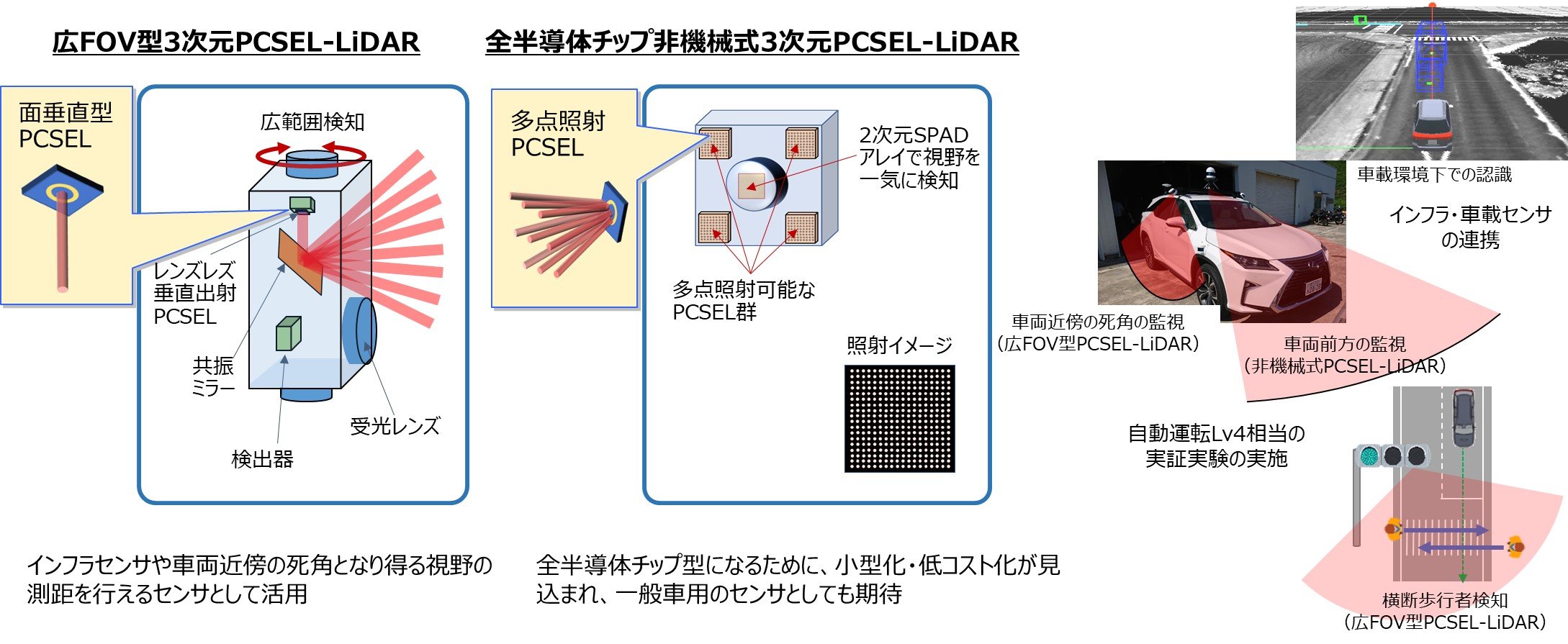
| 取組概要 | 本研究開発では、PCSEL*を搭載した3次元PCSEL-LiDARシステムの開発に取り組む。本研究開発では、はじめにインフラセンサや、車両近傍の死角となり得る視野の測距を念頭におき、広FOV型3次元PCSEL-LiDARシステムの試作・開発を行う。さらに、将来的に小型化・低コスト化・低消費電力化が見込まれる非機械式3次元PCSEL-LiDARシステムの試作・開発を行い、それが、典型的ベンチマークと同等以上の性能を将来的に実現可能である見通しを得ることを目指す。また3次元PCSEL-LiDARを用いた認識技術を開発し、インフラセンサや車載センサとして活用した実証実験を通してPCSEL-LiDARの有効性を示す。 *PCSEL(Photonic Crystal Surface Emitting Laser) |
||
| 実施者 | 金沢大学、京都大学 | ||
| 解決を 目指す 課題 |
・都市内小道路における歩行者・自転車等が絡む交通事故 ・3次元LiDARセンサの小型化・低コスト化・低消費電力化 |
研究成果 | 【2025年度】 ・広FOV型3次元PCSEL-LiDARの基本技術開発・基礎評価の完了 ・インフラセンサとして用いた実証実験の実施 【2027年度】 ・非機械式3次元PCSEL-LiDARの試作完了 ・上記PCSEL-LiDAR の製品化計画の立案 ・インフラセンサ、車載センサを協調させたレベル4相当の自動運転の実証実験を実施 |